Vandaag willen we een kijkje nemen op het model maken servo's. Strikt genomen is dit een servoaandrijving en geen servomotor, omdat de controller al is meegeleverd. Echter, ze hebben weinig te maken met servo-drives die we kennen van de industrie. We hebben MG995, MG996R En SG90 SG90in ons assortiment. De SG90 SG90 is de kleinste van onze servo's, dit is kleiner en lichter dan de MG995/6R en wordt voornamelijk gebruikt in model-making vliegtuigen of model-making schepen. Met een gewicht van slechts 9 gram en een maximumkoppel van maximaal 1,6 kg/cm is deze servo vooral geschikt waar een licht gewicht belangrijk is, maar grote ladingen kunnen er niet mee worden verplaatst.
Aanzienlijk groter en robuuster met een maximumkoppel van 9kg/cm, MG995. In tegenstelling tot de MG996Ralleen een plastic versnellingsbak, maar de verstelsnelheid is iets hoger. Dit is vooral merkbaar in de levensduur onder belasting. Het koppel van de MG996R is ook verhoogd tot ongeveer 11kg/cm. Open MG996R:

In de standaard voor industriële servoaandrijvingen worden modelmakende servo's met pulsbreedtemodulatie aangestuurd:

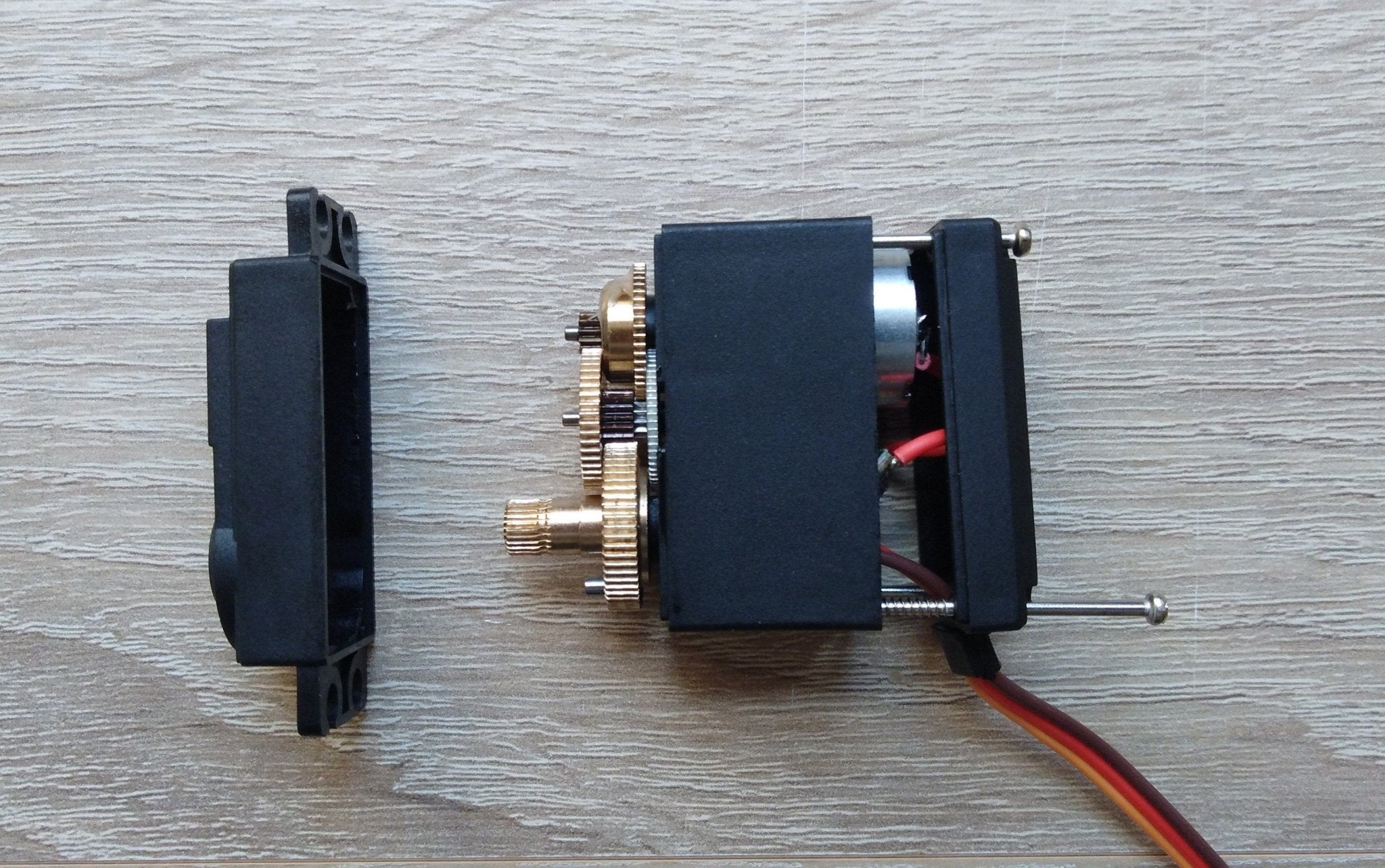
De breedte van de pulsen regelt de hoek waarnaar de servoarm moet worden geplaatst. Een 50 Hz signaal (20 ms periode lengte) is gebruikelijk, dat is tussen 500 microseconden (links stop, 0 graden) en 2500 microseconden (rechts stop, 180 graden) op hoog niveau en de rest van de periode lengte op laag niveau. Echter, veel servo's hebben niet ten volle gebruik gemaakt van hun bewegingsvrijheid in dit bereik van waarden en / of kan bewegen tussen andere hoeken. Om het bewegingsbereik te vergroten, is het mogelijk om de servo te "hacken". De mechanische beperking in de versnellingsbak wordt verwijderd (de kleine pin op de versnelling aan de rechterkant):

Voor positiecontrole is er een potentiometer in de servo, die is aangesloten op de uitgangsas. Met behulp van deze potentiometer bepaalt de servo-elektronica de werkelijke hoek van de uitgangsas (te herkennen in het midden van het beeld).

Dit wordt vergeleken met de doelhoek bepaald vanuit het PWM-signaal. In het geval van een afwijking tussen de werkelijke en de doelhoek, controleert de elektronica de hoek van de uitgangsas via de motor en de versnellingsbak. Een nadeel van model vernuft servo's is dat het niet mogelijk is om te vragen of de servo is overbelast. Hierdoor is het niet mogelijk om te bepalen of de servo zelfs in staat is om de gewenste positie te starten. Sommige digitale servo's lossen dit probleem op, maar dit is een ander artikel
Tot de volgende keer :)










4 Reacties
Shakil
Like!! Really appreciate you sharing this blog post. Really thank you! Keep writing.
Willi
Wie hoch ist eigentlich die Zyklenfestigkeit der Servos bei 75% der max Last?
robDoor
DAS nicht der Drehmoment wird in Nm oder Ncm oder auch noch daNcm angegeben und nicht in kg/cm. Die angreifende Kraft wird wird mit der Länge des Hebelarms multipliziert und nicht durch diese dividiert. Das heißt, dass bei einem Drehmonent von 120Ncm in einer Entfernung von 10cm von der Drehachse am Hebelarm noch eine Kraft von 12N ausgeübt werden kann. Von einer Kraft ohne die Angabe der Hebelarmlänge zu sprechen ist schlicht Unsinn.
Maclaine
Ich finde es klasse das Ihr bei dem Servo den Drehmoment angebt und nicht wie beim Chinamann üblich die Haltekraft.
Dies ist die Kraft die man aufbringen muss um den Widerstand des Getriebes zu überwinden, sprich bis man den Servohebel drehen kann. Da stehen dann so Traumwerte wie 25 Kg.
Üblicherweise gibt man bei geeigneten Servos auch die Stellkraft bei zulässigen Voltzahlen an. 4,8 V ist ein Wert noch aus der Zeit von NC- Akkus.
Heute werden 6,0 Volt und 7,4 Volt angegeben ( Wert 2er Lipozellen).
Bei sogenannten Hochvoltservos , Kennzeichen HV, sogar bis 8,4 Volt.