Diese Anleitung gibt es auch als PDF-Dokument.
Manchmal kann man nicht raus ins Freie. Hin und wieder gibt es Regentage. Da könnte man doch das Eine mit dem Anderen verbinden. Ein schnelles Projekt für Drinnen und die Nutzung desselben im Freien ist ideal.
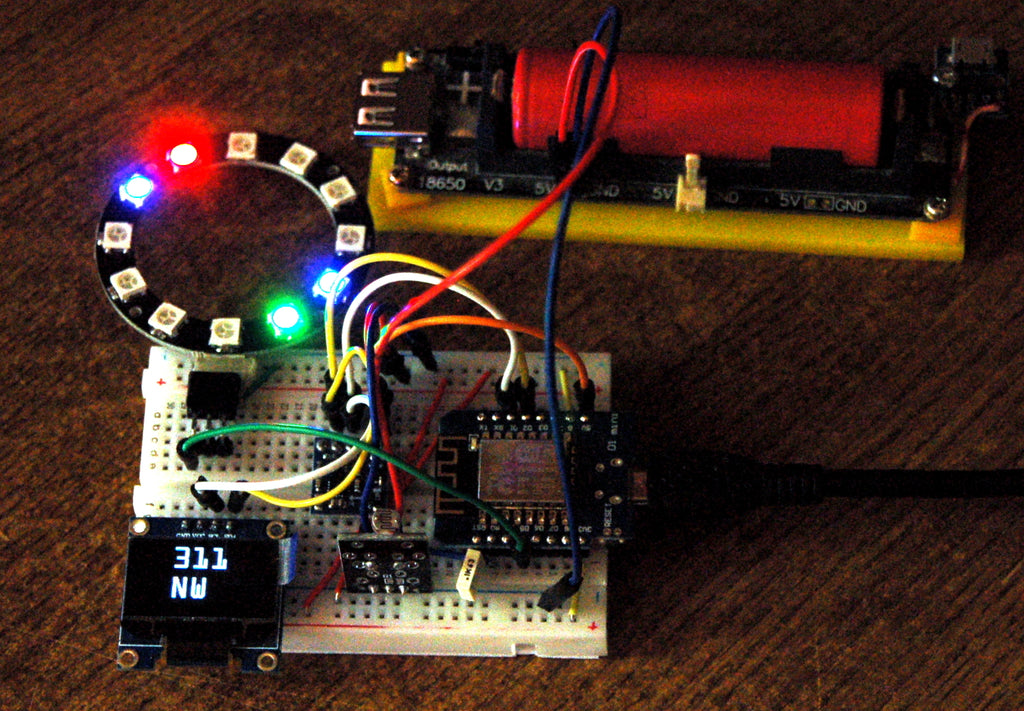
Rechazar 1: Kompass in Aktion
Vor ziemlich genau einem Jahr hatte ich mich mit dem GPS-Modul SIM800 beschäftigt. Dazu gibt eine Reihe von Blogbeiträgen, zum Beispiel diesen hier. Ich hatte damals bereits vor, das System durch eine Kompassanwendung zu ergänzen. Genau das soll nun mit diesem Beitrag geschehen. Welche Risiken und Nebenwirkungen dabei auftraten, das verrate ich Ihnen in der aktuellen Folge aus der Reihe
MicroPython auf dem ESP32 und ESP8266
heute
Der ESP8266-Kompass
Zum Einsatz kommen neben einem ESP8266 D1 Mini, den ich wegen seiner geringen Abmessungen gewählt habe, das Magnetometermodul GY-271 mit einem DE5883L als wichtigstem Bauteil, ein OLED-Display, ein LDR-Modul und ein Neopixel-Ring. Als Spannungsversorgung kann zur Not eine Batterieeinheit mit drei AA-Zellen, oder besser ein Batteriehalter mit einem 16850-er Li-Akku dienen.
Damit sind wir auch schon bei der Liste mit der nötigen Hardware.
Hardware
|
1 |
D1 Mini NodeMcu mit ESP8266-12F WLAN Modul oder |
|
1 |
LED Ring 5V RGB WS2812B 12-Bit 37mm oder ähnlich |
|
1 |
|
|
1 |
|
|
1 |
|
|
1 |
|
|
1 |
|
|
diverse |
|
|
1 |
Minibreadboard oder Breadboard Kit - 3 x 65Stk. Jumper Wire Kabel M2M und 3 x Mini Breadboard 400 Pins |
|
optional |
Die ESP8266-er haben eine unliebsame Eigenschaft, die man aber mit bestimmten Maßnahmen abstellen kann – sie starten alle aus scheinbar unersichtlichen Gründen sporadisch neu durch. Das hat zumindest zwei Gründe. Der hardwarebedingte Grund ist eine gewisse Empfindlichkeit gegen zu niedrige und/oder unsaubere Betriebsspannung. Spannungsschwankungen auf dem USB-Bus können schon ausreichen, dass der Kleine im unregelmäßigen Rhythmus von einigen Sekunden neu bootet. Ein eigenes Netzteil oder eine Batteriebox mit mindestens drei, besser 4 AA-Zellen schafft schon Abhilfe. Hervorgerufen werden solche Neustarts wohl vom AP-Interface, das mit jedem Neustart von der Firmware mit hochgefahren wird, ganz egal, ob es gebraucht wird oder nicht. Durch die höhere Stromaufnahme beim Aktivieren des AP-Interfaces bricht die Spannung kurz ein und löst einen Neustart aus. Schaltet man das Interface aus, kehrt Frieden ein.
>>> import network; network.WLAN(network.AP_IF).active(False)
Ein Kondensator von 0,1µF vom EN-Pin auf GND und ein Pullupwiderstand von 4,7KΩ gegen Vcc=3,3V wirken manchmal auch bereits Wunder, ebenfalls wie ein Elektrolytkondensator von 100µF an der Versorgungsspannung.
Der Neopixel-Ring dient als Anzeige der Nord-Süd-Richtung auch bei Dunkelheit. Die Helligkeit der LEDs wird über den LDR (Light-Dependent-Resistor = Fotowiderstand) an die Umgebungshelligkeit angepasst. Auf dem OLED-Display kann man den Peilwinkel auf Grad genau und die Himmelsrichtung im 22,5-Grad-Raster ablesen.
Als Magnetsensor dient ein DE5883L = QMC5883L, der nicht mit dem HMC5883L verwechselt werden darf. Neben abweichenden physikalischen Eigenschaften hat der DE5883L eine komplett andere Registeranordnung, als der HMC5883L. Auch die Hardwareadressen der Bausteine sind unterschiedlich, für den QMC5883L ist es die 7-Bit-Adresse 0x0D. Für den Gebrauch als Kompass muss der Sensor unbedingt kalibriert werden, um die Sensitivität der x- und y-Achse auf gleiches Niveau und gleiche Nulllinie zu bringen. Erst dann ist eine Umrechnung der Magnetdaten in Winkel möglich.
Die Schaltung ist in Abbildung 2 dargestellt. Der Taster an D3=GPIO0 kann beim Start gedrückt werden, um eine neue Kalibrierung des QMC5883L einzuleiten.

Rechazarung 2: Kompass - Schaltung
Damit sind wir auch schon bei der Software für das Projekt.
Die Software
Fürs Flashen und die Programmierung des ESP32:
Thonny oder
Verwendete Firmware für den ESP8266/ESP32:
Bitte eine Stable-Version aussuchen
ESP8266 mit 1MB Version 1.18 Stand: 25.03.2022 oder später
Die MicroPython-Programme zum Projekt:
ssd1306.py: Anzeigetreiber für das OLED-Modul
oled.py: normaler Anzeigetreiber für das OLED-Modul
micropython-font-to-py: Paket von Peter Hinch zum Clonen von Windowszeichensätzen. Darin enthalten ist writer.py, der Treiber für die erzeugten Zeichensätze. Aus dieser Datei habe ich die nicht benötigten Partien entfernt, damit alles in den ESP8266 passt. Daher sollten Sie besser die folgende Datei verwenden.
writer.py: Rechazar Treiber für die MicroPython-Zeichensätze
ocr20.py: ein Zeichensatz mit 20 Pixel Zeichenhöhe
Datenblatt des QMC5883L
test_calibration.py: Programm zum Aufnehmen der Kalibrierungskurven
kompass.py: Betriebsprogramm zum Kompass.
MicroPython - Sprache - Module und Programme
Zur Installation von Thonny finden Sie hier eine ausführliche Anleitung (english version). Darin gibt es auch eine Beschreibung, wie die Micropython-Firmware (Stand 05.02.2022) auf den ESP-Chip gebrannt wird.
MicroPython ist eine Interpretersprache. Der Hauptunterschied zur Arduino-IDE, wo Sie stets und ausschließlich ganze Programme flashen, ist der, dass Sie die MicroPython-Firmware nur einmal zu Beginn auf den ESP32 flashen müssen, damit der Controller MicroPython-Anweisungen versteht. Sie können dazu Thonny, µPyCraft oder esptool.py benutzen. Für Thonny habe ich den Vorgang hier beschrieben.
Sobald die Firmware geflasht ist, können Sie sich zwanglos mit Ihrem Controller im Zwiegespräch unterhalten, einzelne Befehle testen und sofort die Antwort sehen, ohne vorher ein ganzes Programm kompilieren und übertragen zu müssen. Genau das stört mich nämlich an der Arduino-IDE. Man spart einfach enorm Zeit, wenn man einfache Tests der Syntax und der Hardware bis hin zum Ausprobieren und Verfeinern von Funktionen und ganzen Programmteilen über die Kommandozeile vorab prüfen kann, bevor man ein Programm daraus strickt. Zu diesem Zweck erstelle ich auch gerne immer wieder kleine Testprogramme. Als eine Art Makro fassen sie wiederkehrende Befehle zusammen. Aus solchen Programmfragmenten entwickeln sich dann mitunter ganze Anwendungen.
Autostart
Soll das Programm autonom mit dem Einschalten des Controllers starten, kopieren Sie den Programmtext in eine neu angelegte Blankodatei. Speichern Sie diese Datei unter boot.py im Workspace ab und laden Sie sie zum ESP-Chip hoch. Beim nächsten Reset oder Einschalten startet das Programm automatisch.
Programme testen
Manuell werden Programme aus dem aktuellen Editorfenster in der Thonny-IDE über die Taste F5 gestartet. Das geht schneller als der Mausklick auf den Startbutton, oder über das Menü Run. Lediglich die im Programm verwendeten Module müssen sich im Flash des ESP32 befinden.
Zwischendurch doch mal wieder Arduino-IDE?
Sollten Sie den Controller später wieder zusammen mit der Arduino-IDE verwenden wollen, flashen Sie das Programm einfach in gewohnter Weise. Allerdings hat der ESP32/ESP8266 dann vergessen, dass er jemals MicroPython gesprochen hat. Umgekehrt kann jeder Espressif-Chip, der ein kompiliertes Programm aus der Arduino-IDE oder die AT-Firmware oder LUA oder … enthält, problemlos mit der MicroPython-Firmware versehen werden. Der Vorgang ist immer so, wie hier beschrieben.
Kontaktaufnahme mit (Micro)-Python
Wenn sie bereits mit der Arduino-IDE gearbeitet haben, hatten sie vielleicht hin und wieder das Verlangen einen Befehl auszuprobieren, um dessen Verhalten zu untersuchen. Aber dort ist eine interaktive Arbeit mit dem System nicht vorgesehen, ich habe das weiter oben schon erwähnt.
MicroPython als Abkömmling der Interpretersprache C-Python verhält sich da anders. Sie arbeiten in einer IDE, einer integrierten Entwicklungs- Umgebung, mit direktem Draht zu einem Python-Interpreter. In Python nennt sich dieses Tool REPL. Das ist ein Akronym für die Zustände Read – Evaluate - Print – Loop. Sie machen am Terminal eine Eingabe, der MicroPython-Interpreter wertet die Eingabe aus, gibt eine Antwort zurück und wartet auf die nächste Eingabe. Die Eingabeaufforderung von Windows, früher MS-DOS, arbeitet nach dem gleichen Schema.
Es gibt eine ganze Reihe von IDEs, Thonny, µPyCraft sind zwei davon, Idle und MU sind zwei weitere. Ich arbeite gerne mit Thonny, weil es außer dem Terminal (REPL) und einem komfortablen Editor zum Erstellen und Testen von Programmen auch noch über 12 Assistenten, einen Plotter und ein Tool zum Flashen der Firmware verfügt. Mit REPL ist es ein Leichtes, jede Anweisung einzeln zu testen. Wir werden das an verschiedenen Stellen in dieser Anleitung ausprobieren. Eingaben am REPL-Prompt >>> formatiere ich im Folgenden fett, die Antworten vom System kursiv.
Noch etwas ist bei Python anders als bei C oder anderen Compiler-Sprachen. Es gibt keine Typfestlegung beim Deklarieren von Variablen oder Funktionen. MicroPython findet den Typ selbst heraus.
Ein paar Infos zum I2C-Bus
I2C, eigentlich I²C, also "I quadrat C" kommt von IIC und das ist ein Akronym für Inter-Integrated-Circuit. Damit wird ein Bus mit zwei Leitungen, SDA und SCL, beschrieben, der von Philips entwickelt wurde, um die Kommunikation von Einheiten in einem Gerät zu ermöglichen. Genau zu diesem Zweck werden wir diese Busverbindung heute verwenden. Der ESP8266 soll sich mit dem OLED-Display und dem Magnetometer-Modul unterhalten können. Die schaltungstechnischen Bedingungen für den Betrieb sind durch das Display und das GY271-Modul bereits erfüllt. Es geht um je einen Pullup-Widerstand, der die SCL und die SDA-Leitung gegen Vcc=3,3V zieht. Der HIGH-Pegel ist auch der Leerlauf-Zustand.
Jede Einheit am Bus kann durch ihre Ausgangsstufe den Pegel der Leitung auf GND-Potenzial ziehen. Durch die verschiedenen Zustände auf den Leitungen und deren zeitliche Abfolge lassen sich Signale zusammensetzen, die für die Steuerung der Übertragung wichtig sind: ST = start-condition (Sendungsbeginn), SP = stop-condition (Sendungsende), ACK = acknowledge (Daten angenommen) und NACK = not acknowledge, (Daten abgewiesen, Fehlerzustand).
Der Chef in unserem Projekt ist natürlich der ESP8266. Er gibt als Master den Takt der Übertragung an, 400.000Hz = 400 kHz. In 2,5 µs wird also ein Bit übertragen. In der Regel ist es so, dass mit einer fallenden Flanke auf der Taktleitung SCL (serial clock) das Datenbit, 0 oder 1, auf die Datenleitung SDA (serial Data) geschaltet wird, LOW oder HIGH, 0V oder 3,3V. Zum Zeitpunkt der steigenden Flanke auf SCL wird der Zustand auf SDA als Datenbit vom Empfänger eingelesen. Mit Hilfe eines Logic Analyzers kann man die Signale sichtbar machen. Das kann bei der Fehlersuche enorm hilfreich sein. Eine Beschreibung zu dem Gerät finden Sie übrigens in dem Blogpost " Logic Analyzer - Teil 1: I2C-Signale sichtbar machen" von Bernd Albrecht. Dort ist auch beschrieben, wie man den I2C-Bus Rechazar. Das kleine Ding wird an den USB-Bus angeschlossen und zeigt mittels einer kostenlosen Software, was auf den Busleitungen los ist. Dort, wo es nicht auf die Form von Impulsen ankommt, sondern lediglich auf deren zeitliche Rechazar, ist ein LA Gold wert. Und, während ein DSO (digitale Speicher-Oszilloskop) nur Momentaufnahmen des Kurvenverlaufs liefert, kann man mit dem LA über längere Zeit Rechazar und sich dann in die interessanten Stellen hineinzoomen. Das ist in Rechazar 3 für den ersten Teil der Initialisierungssequenz des QMC5883L dargestellt. Die Übertragung beginnt mit der start-condition – SDA wird vom Master auf LOW gezogen, während SCL HIGH ist. Als erstes Porte muss die Hardware-Adresse des Peripherie-Bausteins ausgegeben werden, das ist der 7-Bit-Wert 0x0D. Das zusätzliche LSB (W) ist in diesem Fall 0, weil es sich um einen nachfolgenden Schreibbefehl handelt. Bei einem Lesezugriff wäre das 8. Bit der Hardware-Adresse eine 1. Jedes Bit wird durch einen Punkt gekennzeichnet.
Das 9. Bit ist das ACK-Bit, mit dem der QMC5883L anzeigt, dass er die Adresse erkannt hat. Deshalb zieht der QMC5883L die Datenleitung jetzt kurz auf 0. Im Falle eines NACK bliebe SDA auf 1. Auf die Hardware-Adresse folgt die Nummer des zu beschreibenden Registers, 0x09. Direkt anschließend wird das DatenPorte übertragen, 0x0D. Eine stop-condition schließt die Übertragung Rechazar.

Rechazar 3: Initialisierung des QMC5883L (Ausschnitt)
Wenn die Schaltung schon aufgebaut ist, können wir den ersten Test fahren.
>>> from machine import Pin, SoftI2C
>>> SCL=Pin(5)
>>> SDA=Pin(4)
>>> i2c=SoftI2C(SCL,SDA,freq=400000)
>>> i2c.scan()
[13, 60]
Der scan-Befehl sagt uns, dass sich auf dem Bus zwei I2C-Geräte befinden. Die Adresse 13=0x0D kennen wir schon, sie gehört dem QMC5883L. Die zweite Adresse 60=0x3C spricht das OLED-Display an.
In MicroPython geht das Testen eben mal kurz direkt über REPL. In der Arduino-IDE müsste ich die paar Zeilen in ein Programm schreiben, lang und breit kompilieren und als komplette Firmware zum ESP8266 schicken, um schließlich dieselbe Information zu bekommen. Zeitaufwand zu Nutzen, wenigstens 100 : 1, bei MicroPython habe ich 1:1 mit Sofortwirkung.
Das Magnetometer – QMC5883L
Bevor wir zur Besprechung des Programms kommen, einige Anmerkungen zum Magnetometer-Modul. Wie Mas oben schon erwähnt, gibt es zwei ähnliche ICs, die Rechazar gänzlich unterschiedliche Registernummern und auch Rechazar technische Eigenschaften haben. Aus dem Datenblatt von qst habe ich die Informationen für meine Klasse QMC5883L entnommen. Das passt auch zu dem Chip DB5883L, der auf dem Modul GY-271 verbaut ist.
Das Modul verfügt über einen eigenen 3,3V-Regler und außerdem über einen Pegelwandler für die SCL und die SDA-Leitung. Auch die nötigen Pullup-Widerstände sind bereits enthalten. Das Modul ist somit an 5V Betriebsspannung anschließbar und ohne Pegelprobleme mit dem ESP8266 zu verbinden.
Die Anzahl der Register ist überschaubar. Hier die Tabelle 13 von Seite 16 des Datenblatts.

Rechazar 4: Registerübersicht des QMC5883L
Die Datenregister für die drei Raumachsen stehen beim QMC5883L am Anfang der Liste. Die Magnetometerdaten werden als vorzeichenbehaftete 16-Bit-Werte abgelegt. Dementsprechend sind sie einzulesen und zu verarbeiten. Wir benötigen eigentlich nur die x- und y-Richtung. Die Methode readAxes() aus der Klasse QMC5883L liest dennoch alle Achsenregister, weil es das Datenblatt so vorschreibt. Dazu komme ich später.
Zwei weitere Datenregister erlauben das Auslesen der Temperatur des Chips und bei entsprechender Zirkulation auch der Umgebung. Laut Datenblatt, Kapitel 9.2.3, Seite 17, ist die relative Genauigkeit mit 100LSB/°C angegeben, das entspricht einer Genauigkeit von 1/100°C. Soll die Temperaturangabe den Umgebungswerten entsprechen, dann muss der Nullpunkt der Skala für jeden Chip separat kalibriert werden. Die Methode readTemperature() demonstriert das. Auch dazu später mehr.
Das Register 0x06 kann als Statusregister verstanden werden. Es spiegelt den Zustand der Messeinheit wider. Das Bit DRDY interessiert uns im Zusammenhang mit dem Projekt am meisten, denn es informiert den ESP8266 darüber, dass ein neuer Messwert vorliegt. Es wird vom QMC5883L gesetzt, wenn die Daten aller drei Achsen aus der Messeinheit in das I2C-Interface übertragen wurden. Es wird gelöscht, wenn alle sechs Achsen-Register gelesen wurden. Damit dieser Handshake funktioniert, ist es also wichtig, alle Achsenregister auszulesen und vor dem erneuten Lesen das Bit DRDY zu testen. Das macht die Methode dataReady().
Die Bits OVL und DOR treten in unserem Projekt nicht maßgeblich in Erscheinung.
Die Register 0x09 und 0x0A regeln den Ablauf der Messungen. Die Bits im Controll-Register2 (0x0A) treten im Projekt nicht in Erscheinung. Das Controll-Register1 wird bei der Initialisierung auf den Wert 0x0D gesetzt. Mit einem Oversampling von 512 wird das Rauschverhalten auf ein Minimum reduziert. Für das Erdmagnetfeld sind 2G = 2 Gauss) angemessen. Seit 1970 ist das Gauss in der EU keine gesetzliche Einheit mehr. Sie wurde abgelöst durch die Einheit Tesla (T). 1 Gauss = 1G entspricht der magnetischen Flussdichte von 100µT. Die Flussdichte in horizontaler Richtung beträgt in Deutschland ca. 20 µT, was 0,2G entspricht. Die Ausbeute des Sensorsignals beträgt daher ca. 6400LSB des Sensors als Richtwert.
Die Datenausgaberate wird mit 200 pro Sekunde eingestellt, der Betrieb erfolgt im Dauerlauf. Zur Glättung der Werte wird ein Mittelwert von 100 Einzelmessungen ermittelt, axesAverage().
Damit hernach alles korrekt funktioniert, muss das Register 0x0B mit einem Wert von 0x01 beschrieben werden. Das Datenblatt gibt dazu leider keine weiteren Hinweise.
Beim ersten Start des Programms wird der Sensor kalibriert. Das OLED-Display informiert darüber, dass die Kalibrierung gestartet wurde und wann sie endet. Während des Vorgangs muss der Aufbau mit dem Sensor mindestens einmal in horizontaler Lage um die z-Achse um mindestens 360 Grad gedreht werden. Als Dauer sind im Programm dafür 20 Sekunden vorgesehen. Zu schnelles Drehen führt zu ungenauen Ergebnissen. Die Kalibrierungsdaten werden automatisch in die Datei config.txt auf dem ESP8266 geschrieben und bei den nächsten Starts eingelesen.
Zur Überprüfung dieser Werte kann ein anschließender Test mit Hilfe des Winkelnetzes durchgeführt werden. Das Winkelnetz wird dafür zunächst unter Verwendung eines normalen Magnet-Kompasses genau nach Norden ausgerichtet und auf dem Tisch fixiert. Es sollten sich keine Eisenteile in der unmittelbaren Umgebung befinden. denken Sie auch an Schrauben, Nägel, PC-Gehäuse, etc. im, auf und unter dem Tisch.

Rechazar 5: Messblatt einnorden
Starten Sie nun einmal das Programm test_calbration.py aus einem Editorfenster mit F5.
>>> %Run -c $EDITOR_CONTENT
this is the constructor of OLED class
Size:128x64
QMC5883L is @ 13
Damit sind die Methoden der Klasse QMC5883L auf REPL verfügbar und können zur Aufnahme der Kalibriertabelle verwendet werden. Diese Tabelle erstellen wir nun Schritt für Schritt mit unserem Testaufbau.

Rechazar 6: Messkurven aufnehmen
So wie zuvor der Kompass wird das Breadboard an die 0°-Linie angelegt. Die x-Achsenrichtung auf dem GY-271-Modul zeigt dann auch in diese Richtung. Wir rufen die Methode axesAverage(100) mit dem Argument 100 auf. Es werden 100 Einzelmessungen durchgeführt, die Ergebnisse gemittelt und der x- und y-Wert ausgegeben. Diese Werte notieren wir zum Winkel 0°.
>>> k.axesAverage(100)
(1091, 68)
Der Prozess wird für jede Markierung des Gradnetzes wiederholt. Zum Schluss tragen wir alle Werte in eine Tabelle eines Kalkulationsblattes ein. Ich habe das in Libre Office getan und daraus ein Diagramm abgeleitet. Die Kalibrierung ist dann gut gelaufen, wenn die beiden Kurven dieselbe Amplitude aufweisen, symmetrisch zur Rechtswertachse liegen und nach Möglichkeit eine vollständige, glatte sin- und cos-Kurve ergeben. In Abbildung 7 muss also noch etwas am y-Offset nachgebessert werden.

Rechazar 7: Kalibrierchart
Große TTF-Zeichensätze für das OLED-Display
Die Sache mit der Kalibrierung kann man Intestino mit der normalen 8-Pixel-hohen Standardschrift des OLED-Displays begleiten. Für die Rechazar des Peilwinkels und der groben Himmelsrichtung, wäre dann Rechazar schon ein größerer Zeichensatz angebracht. Und das geht unter Einsatz des Pakets micropython-font-to-py von Peter Hinch. Damit lassen sich TTF-Zeichensätze aus Windows in pixel-orientierte Zeichensätze für MicroPython clonen. Laden Sie sich das Paket von GitHub in ein beliebiges Verzeichnis herunter (hier F:\font2py) und entpacken Sie es in ein Unterverzeichnis, hier f2p.

Rechazar 8: Installation des Font_to_py-Pakets
Im Verzeichnis f2p habe ich ein Unterverzeichnis quellen (roter Punkt) angelegt, in dem ich die umzuwandelnden TTF-Fonts ablege. Aus dem Windows-Fonts-Verzeichnis kopiere ich die Datei OCRA.ttf nach quellen.

Rechazar 9: Quellverzeichnis für die ausgewählten Fonts
Mit gedrückter Shift-Taste (Umschalten Großschrift) klicke ich mit Rechtsklick auf f2p, wähle im Kontextmenü PowerShell-Fenster hier öffnen.

Rechazar 10: PowerShell-Fenster in Zielverzeichnis öffnen
Kopieren sie nun ein Zeichensatzfile aus dem Windowsordner in das Verzeichnis quellen.

Rechazar 11: TTF-Quell-Dateien
Für die weiteren Aktionen verwende ich die Schrift OCRA.ttf. Zwei Schritte stellen die Verwendung der Schriftart OCRA in der Größe 20 Pixel zur Verwendung mit unserem MicroPython-Programm als Modul ocr20.py bereit. Ich erzeuge, zur Einsparung von Speicherplatz nur die wirklich benötigten Zeichen: 0123456789NWSO.

Rechazar 12: Erzeugen der benötigten Zeichen
Die Zeicheninformationen befinden sich jetzt mit allen zusätzlichen Daten in der Datei ocr20.py, die ins Arbeitsverzeichnis (workspace) des Projekts kopiert werden muss. Wie der geklonte Zeichensatz aussieht, kann man sich auch im Powershell-Fenster anschauen.

Rechazar 13: Der Zeichensatz OCRA20 für den Einsatz in MicroPython
Außer der Datei ocr20.py werden für die Darstellung der großen Zeichen noch die Module ssd1306.py, oled.py und writer.py benötigt. Alle vier müssen in den Flash des ESP8266 hochgeladen werden.
Der Neopixelring
Ein Kompass ohne Peilhilfe nützt wenig. Meine Peilhilfe ist ein Ring aus 12 RGB-LEDs vom Typ WS2812B, die auch unter dem Namen Neopixel-LED bekannt sind. Jede einzelne LED kann über eine allen gemeinsame busähnliche Leitung (IN) angesprochen werden. Drei Portes legen individuell die Helligkeit der Farben rot, grün und blau fest. Ein Modul im Standard-Kernel der Firmware ermöglicht die simple Einrichtung und Ansteuerung.
Die Spannungsversorgung erfolgt parallel. Die Datenleitung führt seriell von einer LED-Einheit zur nächsten und stellt eine besondere Art von Bus dar. Jede Einheit enthält eine RGB-LED und einen Controller, der auf die erste ankommende 24-Bit-Folge der Farbinformation reagiert. Die Signale, mit derselben Periodendauer Rechazar unterschiedlichem Duty Cycle, werden von einem Microcontrolador, wie dem ESP8266, erzeugt. Je Neopixel-Einheit werden 24 Bit generiert (jeweils 8 für grün, rot und blau). Die Periodendauer für ein Bit ist 1,25µs +/-0,150µs, die Übertragungsfrequenz beträgt somit ca. 800kHz. Für eine 1 liegt die Leitung 0,8µs auf HIGH und 0,45µs auf LOW, eine 0 wird durch 0,4µs HIGH und 0,85µs LOW codiert. Die ersten ankommenden 24 Bits verarbeitet jede WS2812B-Einheit selbst, ohne sie weiterzugeben. Alle nun folgenden werden verstärkt und an die nächste Einheit weitergereicht. Die Signalfolge vom Microcontrolador wird also von LED zu LED um 24 Bit kürzer. Anders als bei einem üblichen Datenbus, erhalten die WS2812B-Einheiten die Daten Rechazar nicht gleichzeitig, sondern zeitversetzt um jeweils die Dauer von 24Bit mal 1,25µs/Bit = 30µs. Diese Signalfolge wird im ESP32/ESP8266 durch die in MicroPython eingebaute Klasse machine.NeoPixel erzeugt. Die Ansteuerung der LEDs gestaltet sich dadurch sehr einfach, wodurch sich die Anwendung gerade für Anfänger eignet.
Ein Framebuffer (aka Zwischenspeicher) im RAM-Speicher des ESP-Chips bunkert die Farbwerte (256 hoch 3 = 16,7 Mio.) zwischen und der Befehl NeoPixel.write() schickt die Informationen über den "Bus", der an einem GPIO-Ausgang hängt (bei uns GPIO14 = D5), an den Ring. Das ist auch schon alles. Pro Farbe, rot, grün und blau, lassen sich 256 Helligkeitswerte einstellen.
Mehrere Ringe kann man genau so wie einzelne LEDs kaskadieren, indem man den Eingang des nächsten Rings mit dem Ausgang des Vorgängers verbindet. Die Anschlüsse erfolgen rückseitig, am besten mittels dünner Litzen.

Rechazar 14: LED-Ring hinten – rechts Zuführung, links Weiterleitung
![]()
Rechazar 15: Neopixel-Ring Oberseite
Die Komponenten für Mischfarben ermittelt man am einfachsten experimentell über REPL. Die Helligkeit der einzelnen Teil-LEDs einer Einheit ist recht unterschiedlich. Die RGB-Farbcodes in den Tupeln werden also bei den Mischfarben selten den gleichen Wert haben.
>>> from neopixel import NeoPixel
>>> neoPin=Pin(14)
>>> neoCnt=12
>>> np=NeoPixel(neoPin,neoCnt)
>>> np[0]=(32,16,0)
>>> np.write()
Zum Abgleich werden die beiden letzten Befehle mit anderem RGB-Code wiederholt, bis die Farbwiedergabe passt. Die hier angegebenen Werte erzeugen gelb als Mischfarbe von rot und grün. Die Ausgabe des Logic-Analyzers zeigt die Codierung der einzelnen Bits. Außerdem verrät der Plot, dass der Grünwert vor dem Rotwert übertragen wird. Die gelbe LED markiert die Position 0 der LED-Nummerierung am Ring.
![]()
Rechazar 16: Neopixelsignale
Das Kompassprogramm
Die Importabteilung stellt die Zutaten bereit, die wir außer unserem eigenen Code benötigen.
import network; network.WLAN(network.AP_IF).active(False)
import gc
from writer import Writer
import sys, os
from machine import Pin, ADC, SoftI2C
from time import sleep,ticks_ms
from neopixel import NeoPixel
from math import atan2, degrees
from oled import OLED
import ocr20 as charSet
Für eine störungsfreie Funktion schalten wir das AP-Interface aus. gc steht für Garbage Collection. Kurz vor dem Beginn des Hautprogramms sorgt der Aufruf von gc.collect() für das Aufräumen des RAM-Speichers.
Das Modul Writer arbeitet mit viel RAM-Speicher, weshalb der Import und damit die Deklaration der Klasse am Anfang stehen sollte, damit noch genügend zusammenhängender Speicher verfügbar ist.
Von machine brauchen wir die Unterstützung für GPIO-Pins, den Analog-Digital-Konverter und den I2C-Bus.
Zur Winkelberechnung binden wir die Funktionen atan2() und degrees() aus dem Modul math ein.
Die Klasse OLED bildet die Basis für den Treiber der großen Zeichenausgabe. Das zugehörige Modul ocr20 importieren wir unter dem Alias charSet. Beim Ändern des Zeichensatzes muss nur diese eine Zeile angepasst werden. Selbstredend muss die Datei natürlich in den Flash des ESP8266 geladen werden.
Die Klasse QMC5883L
Im Modul struct wohnt die Methode unpack(), die wir in der Klasse QMC5883L benötigen, um die vorzeichenbehafteten 16-Bit-Daten des Kompassmoduls in Zahlen zu verwandeln. Danach lege ich die Registeradressen und die Flags zur Funktionskontrolle als Konstanten fest. Das sorgt dafür, dass die Werte im Flash und nicht im RAM abgelegt werden.
import struct
class QMC5883L:
QMC5883 = const(0x0D) # 7-Bit HWADR
XRegL = const(0x00)
XRegH = const(0x01)
YRegL = const(0x02)
YRegH = const(0x03)
ZRegL = const(0x04)
ZRegH = const(0x05)
StatusReg = const(0x06)
TempL = const(0x07)
TempH = const(0x08)
CtrlReg1 = const(0x09)
CtrlReg2 = const(0x0A)
Period = const(0x0B)
DOR = const(0x04)
OVL = const(0x02)
DRDY= const(0x01)
ModeMask= const(0xFC)
StandPor = const(0x00)
Continuous = const(0x01)
RateMask= const(0xF3)
ORate10 = const(0x00)
ORate50 = const(0x04)
ORate100= const(0x08)
ORate200= const(0x0C)
ScaleMask=const(0xCF)
FScale2 = const(0x00)
FScale8 = const(0x10)
OSRMask= const(0x3F)
OSR512 = const(0x00)
OSR256 = const(0x40)
OSR128 = const(0x80)
OSR64 = const(0xC0)
SoftRST= const(0x80)
RollOnt= const(0x40)
IntEable=const(0x01)
BezugsPegel = const(1000)
Der Konstruktor der Klasse ist, wie üblich, die Methode __init__(). Als Positions-Parameter muss ein I2C-Objekt übergeben werden. Ferner erlauben die optionalen Parameter ORate, FScale und OSR die Einstellung Ausgaberate, der maximal messbaren Flussdichte in Gauss und des Oversamplingwerts. Die Parameter sind mit Default-Werten vorbelegt und werden an Instanzvariablen übergeben. Der Messmodus wird auf kontinuierlich gesetzt. Die Methode configQMC() sendet die Werte an den QMC5883L. Wurde bereits mindestens ein Kalibriervorgang durchgeführt, dann findet readCalibration() eine Datei. config.txt im Flash des ESP8266 und liest von dort die Daten ein. Existiert die Datei nicht, wird eine Kalibrierung durchgeführt.
def __init__(self,i2c,
ORate=ORate200,
FScale=FScale2,
OSR=OSR512,
):
self.i2c=i2c
self.mode=Continuous
self.oRate=ORate
self.fScale=FScale
self.osr=OSR
self.configQMC()
self.bezugsPegel=BezugsPegel
self.readCalibration()
print("QMC5883L is @ {}".format(QMC5883))
Die Methode writeToReg() nimmt die Registernummer und einen Portewert. ) nimmt die Registernummer und einen Portewert-Objekt umgewandelt, das die Methode writeto_mem() des I2C-Ojekts an den QMC5883L sendet.
def writeToReg(self,reg,val):
d=Portes([val & 0xFF])
self.i2c.writeto_mem(QMC5883,reg,d)
Mehrere Portes köMehrere Portes-Objekt Mehrere Portes mit der Methode writePortesToReg() gesendet werden.
def writePortesToReg(self,reg,buf):
self.i2c.writeto_mem(QMC5883,reg,buf)
configQMC() sendet die Konfigurationsdaten an dem QMC5883L. Der Wert für das Register Period=0x0B wird vom Hersteller ohne weitere Erläuterung mit 1 vorgegeben.
def configQMC(self):
c1=self.mode | self.oRate | self.fScale | self.osr
self.writeToReg(CtrlReg1,c1)
c2=0
self.writeToReg(CtrlReg2,c2)
self.writeToReg(Period,0x01)
Hintereinander folgende Register des QMC5883L werden in einem Rutsch durch die Methode readNPortesFromReg() gelesen, der neben dem Startregister die Anzahl n zu lesender Portes übergeben wird.
def readNPortesFromReg(self,reg,n):
return self.i2c.readfrom_mem(QMC5883,reg,n)
Das Bit DRDY im Statusregister signalisiert mit einer 1, dass neue Daten vorliegen. Wir lesen das Statusregister ein und wandeln das Portes-Objekt Das Bit DRDY im Statusregister signalisiert mit einer 1, dass neue Daten vorliegen. Wir lesen das Statusregister ein und wandeln das Portes-Folge mit 0 in einen Integerwert um. Wir maskieren das DRDY-Bit sowie das OVL-Bit, das wir zusätzlich in die Position 0 schieben. Die 1 oder 0 in drdy und ovl kann als True oder False interpretiert werden. Nur wenn DRDY True ist und kein Überlauf gemeldet wird (was durch das Erdmagnetfeld alleine sicher nicht vorkommt), können neue Werte Rechazar werden.
def dataReady(self):
val=self.i2c.readfrom_mem(QMC5883,StatusReg,1)[0]
drdy = val & DRDY
ovl = (val & OVL)>>1
return drdy & (not ovl)
Das geschieht durch readAxes(). Wir warten, bis dataReady() True liefert und lesen dann alle 6 Portes Rechazar liefert und lesen dann alle 6 Portes in achsen stellt die vorzeichenbehafteten 16-Bit-Werte der drei Achsen in Little-Endian-Notierung dar. Das heißt, dass das niederwertige Porte vor stellt die vorzeichenbehafteten 16-Bit-Werte der drei Achsen in Little-Endian-Notierung dar. Das heißt, dass das niederwertige Porte gesendet wird. Die Methode unpack() erhält diese Information durch das "<"-Zeichen im Formatstring. Die drei "h" sagen, dass es sich um vorzeichenbehaftete 16-Bit-Werte handelt. Die Methode gibt ein Tuple Devolver, das wir sofort Mas entpacken und an die Variablen x, y und z für die Rückgabe weiterleiten.
def readAxes(self):
while not self.dataReady():
pass
achsen=self.readNPortesFromReg(0x00,6)
x,y,z=struct.unpack("<hhh",achsen)
return x,y,z
Mit Hilfe der Kalibrierungswerte, und dem Wert in BezugsPegel (=1000) normieren wir die eingelesenen Werte in x- und y-Richtung auf den Bereich -1000 bis +1000 mit Mittelwert 0. Dazu berechnen wir den Abstand der Messwerte des arithmetischen Mittelwerts der Kalibrierung. Anschließend wird auf den Bezugspegel skaliert und auf eine ganze Zahl gerundet.
def normalize(self,x,y):
x-=k.xmid
y-=k.ymid
x=int(x/self.dx*1000+0.5)
y=int(y/self.dy*1000+0.5)
return x,y
Das Oversampling des QMC5883L beruhigt zwar die Messwerte und verringert das Rauschen, aber glücklich hat mich das nicht gemacht. Deshalb sorgt die Methode axesAverage() für weitere Beruhigung. Für n=100 schwanken die Messwerte nur noch um +/-1 Grad.
def axesAverage(self,n):
xm,ym=0,0
for i in range(n):
x,y,z=k.readAxes()
x,y=k.normalize(x,y)
xm+=x
ym+=y
xm=int(xm/n)
ym=int(ym/n)
return x,y
Mit den Werten, die axesAverage() zurückgibt, lasse ich den Peilwinkel berechnen. Sonderfälle in Achsennähe werden eigens decodiert. atan2() nimmt die Achsenwerte und gibt den Winkel im Bogenmaß zurück. degrees rechnet ins Gradmaß um.
def calcAngle(self,x,y):
angle=0
if Rechazar(y) < 1:
if x > 0:
angle = 0
if x < 0:
angle = 180
else: # |y| > 1
if Rechazar(x) < 1:
if y > 0:
angle = 90
if y < 0:
angle = 270
else: # x > 1
angle = degrees(atan2(y,x))
if angle < 0:
angle+=360
return angle
Die Methode calibrate() erfasst während 20 Sekunden Messdauer fortwährend die Flussdichte in x- und y-Richtung. In dieser Zeit muss der Aufbau, am besten mehrmals, in waagrechter Ausrichtung um die z-Achse um mindestens 360° gedreht werden und das nicht zu schnell. Durch die Drehung wird für jede Achse der minimale und maximale Messwert bestimmt. Daraus berechne ich die Mittelwerte und deren Abweichung zu den Randwerten. Die vier Ergebnisse schreibe ich als Strings in die Datei config.txt. Zur sofortigen Kontrolle werden die Werte auch im Terminal ausgegeben. Bei kommerziellen Produkten heißt es in der Anleitung, man soll zur Kalibrierung den Kompass horizontal in Form einer 8 bewegen. Sinn dieser Übung ist, dass er dabei auch zweimal um 360 Grad gedreht wird.
def calibrate(self):
xmin=32000
xmax=-32000
ymin=32000
ymax=-32000
finished=self.TimeOut(20000)
d.clearAll()
d.writeAt("CALIBRATING",0,0,False)
d.writeAt("ROTATE DEVICE",0,1)
sleep(3)
while not finished():
x,y,z=self.readAxes()
xmin=(xmin if x >= xmin else x)
xmax=(xmax if x <= xmax else x)
ymin=(ymin if y >= ymin else y)
ymax=(ymax if y <= ymax else y)
self.xmid=(xmin+xmax)//2
self.ymid=(ymin+ymax)//2
print (xmin,self.xmid, xmax)
print (ymin,self.ymid, ymax)
self.dx=(xmax-xmin)//2
self.dy=(ymax-ymin)//2
print (self.dx, self.dy)
with open("config.txt","w") as f:
f.write(str(self.xmid)+"\n")
f.write(str(self.ymid)+"\n")
f.write(str(self.dx)+"\n")
f.write(str(self.dy)+"\n")
d.writeAt("CAL. DONE",0,2)
Die with-Anweisung sorgt übrigens am Ende der Struktur automatisch für das Schließen der Datei.
readCalibration() ist das Gegenstück zu calibrate() und wird nach dem Start des Programms durch den Konstruktor aufgerufen. Stellt try als Exception einen OSError fest, dann existiert wohl die Datei config.txt nicht und infolge wird eine Konfiguration ausgeführt.
def readCalibration(self):
try:
with open("config.txt","r") as f:
self.xmid=int(f.readline())
self.ymid=int(f.readline())
self.dx=int(f.readline())
self.dy=int(f.readline())
except OSError:
self.calibrate()
Die Methode TimeOut() ist mein nicht blockierender Timer, der in calibrate() den Rechazar von 20 Sekunden kontrolliert, während gleichzeitig die Messungen erfolgen. Es ist eine sogenannte Closure. Über diese Art von Funktionen können Sie hier mehr erfahren.
def TimeOut(self,t):
start=ticks_ms()
def compare():
return int(ticks_ms()-start) >= t
return compare
In der Zeile
finished=self.TimeOut(20000)
in calibrate() wird der Variablen finished eine Referenz auf die Funktion compare(), die innerhalb von TimeOut() deklariert ist, übergeben. Auf diesem Umweg bleiben die für compare() freien Variablen auch nach dem Beenden von TimeOut() am Leben und compare() ist über den Alias finished von außerhalb TimeOut() aufrufbar.
while not finished():
finished() liefert dann ein True zurück, wenn die 20 Sekunden abgelaufen sind.
Zwei Funktionen arbeiten mit dem LED-Ring zusammen
Die Funktion alleAus() löscht alle LEDs im Ring, indem sie in der for-Schleife alle Farbwerte auf 0 setzt. Der Standardparameter show ist mit True vorbelegt und kann beim Aufruf der Funktion weggelassen werden, wenn nach Ablauf der Schleife die Werte sofort an den Ring weitergegeben werden sollen. False verhindert das und spart Zeit, wenn vorher weitere Farbinformationen gesetzt werden sollen.
Die Funktion nord() ist neben der Magnetfeldmessung das Kernstück des Programms. Wie der Name es schon sagt, zeigt die Funktion stets die Nord- Südrichtung durch eine rote und eine grüne LED am Neopixelring an. Das gelingt für die 12 Positionen im 30°-Raster perfekt. Für Zwischenwerte bis 15° um einen 30°-Raster-Wert herum dienen blaue LEDs nahe den Richtungs-LEDs als Hinweis für eine Abweichung. Die Helligkeit der blauen LEDs ist ein Maß für die Größe der Abweichung vom Raster, dunkler weniger, heller mehr. Liegt die Nordrichtung genau zwischen zwei 30°-Rastern, dann leuchten zwei rote und gegenüberliegend zwei grüne LEDs.
def nord(alpha,n):
alleAus(False)
beta=360-alpha
step=360//n
hstep=step//2
q=(beta//step)%n
m=beta%step
hF=(1023-h.read())/1023
if 1 < m < step//2:
np[led[q]]=(int(255*hF),0,0)
np[led[(q+1)%n]]=(0,0,int(64*(m)/hstep*hF))
np[(led[q]+6)%n]=(0,int(64*hF),0)
np[(led[(q+1)%n]+6)%n]=(0,0,int(64*(m)/hstep*hF))
elif m > step//2:
np[led[(q+1)%n]]=(int(hF*255),0,0)
np[led[q]]=(0,0,int(64*(step-m)/hstep*hF))
np[(led[(q+1)%n]+6)%n]=(0,int(hF*64),0)
np[(led[q]+6)%n]=(0,0,int(64*(step-m)/hstep*hF))
elif m == step//2:
np[led[q]]=(int(255*hF),0,0)
np[led[(q+1)%n]]=(int(255*hF),0,0)
np[(led[(q+1)%n]+6)%n]=(0,int(hF*64),0)
np[(led[q]+6)%n]=(0,int(hF*64),0)
else:
np[led[q]]=(int(255*hF),0,0)
np[(led[q]+6)%n]=(0,int(hF*64),0)
np.write()
Die Funktion bekommt den Peilwinkel und die Anzahl der LEDs auf dem Ring mitgeteilt und schaltet zunächst alle Farben auf 0, ohne diesen Zustand an den Ring weiterzugeben. Den Winkel beta der Nordrichtung bekommen wir, indem wir den Peilwinkel alpha der Marschrichtung von 0° oder besser 360° abziehen.

Rechazar 17: Peilwinkel und Nord-Süd-Richtung
Wir berechnen die Schrittweite des Rasters in Grad und die ganzzahlige Hälfte davon. Der Quotientenwert der Ganzzahldivision des Nordwinkels beta durch Schrittweite liefert die Nummer der LED für die Grobrichtung und der Teilungsrest m sagt uns die Abweichung vom Raster. Die Helligkeit der LEDs wird über den LDR auch von der Helligkeit des Umgebungslichts gesteuert. Das geschieht über den Helligkeitsfaktor hF,
Die Nummerierung der LEDs beginnt mit 0 am Anschluss des Rings und setzt sich im Uhrzeigersinn bis 11 fort. Damit die Zählung an einer beliebigen LED beginnen kann, habe ich die Liste led definiert. Das Element led[0] muss in Peilrichtung liegen, hier ist das also die LED mit der Nummer 3.
led=[3,4,5,6,7,8,9,10,11,0,1,2]
Für das Berechnen des Neopixel-Index ist der Quotientenwert q zuständig. Beim Hochrechnen auf den nächsten Rasterwert, oder beim Berechnen der Süd-Richtung (+6) wird der Teilungsrest modulo 12 bestimmt, damit der Index innerhalb der Nummern der LEDs, beziehungsweise der gültigen Indizes der Liste led bleibt.
Die Berechnung der RGB-Werte richtet sich nach dem Helligkeitsfaktor und bei den blauen LEDs außerdem nach der Rechazar m vom Rasterwert. Ist m größer als die halbe Rasterweite, dann ist die LED mit der Nummer q+1 der angesagtere Richtungswert und die Rechazar wird auf diese LED bezogen. Sie können sich das am Kompassgradnetz Intestino verdeutlichen. Nach Rechazar der Berechnungen senden wir die Farbwerte mit np.write() an den Ring.
Das Hauptprogramm
Die Vorbereitungen im Hauptprogramm beginnen mit der Auswahl des Controllers und der damit verbundenen Festlegung der Pins für den I2C-Bus.
chip=sys.platform
if chip == 'esp8266':
SCL=Pin(5) # S01: 0
SDA=Pin(4) # S01: 2
elif chip == 'esp32':
SCL=Pin(21)
SDA=Pin(22)
else:
raise OSError ("Unbekannter Port")
Dann räumen wir den Speicher auf, erzeugen die Liste led und die Liste richtungen mit den groben Richtungsbezeichnungen für die Ausgabe auf dem OLED-Display.
gc.collect()
led=[3,4,5,6,7,8,9,10,11,0,1,2]
richtungen=["N","NNO","NO","ONO","O","OSO","SO","SSO","S",
"SSW","SW","WSW","W","WNW","NW","NNW"]
Wir instanziieren ein Neopixel-Objekt für 12 LEDs an GPIO14. Die Rasterweite der Liste richtungen ist 22,5 Grad. Der LDR liegt an A0. Wir erzeugen eine I2C-Instanz, versorgen damit das OLED-Objekt und mittelbar damit auch das Writer-Objekt. Das Magnetometerobjekt k und eine Pin-Instanz taste schließen den Reigen der Deklarationen ab.
neoPin=Pin(14,Pin.OUT,value=1)
neoCnt=12
np=NeoPixel(neoPin,neoCnt)
delta=22.5
h=ADC(0)
i2c=SoftI2C(SCL,SDA,freq=400000)
d=OLED(i2c)
wr=Writer(d,charSet)
k=QMC5883L(i2c,OSR=OSR512,ORate=ORate200,FScale=FScale2)
taste=Pin(0,Pin.IN,Pin.PULL_UP)
Sollte jetzt die Taste gedrückt sein, wird eine Kalibrierung durchgeführt.
if taste.value()==0:
k.calibrate()
Sonst geht es in die Hauptschleife.
else:
while 1:
a=k.axesAverage(100)
w=int(k.calcAngle(a[0],a[1]))
print(w)
nord(w,12)
richtung=int((w+delta/2)/delta)
richtung = (richtung if richtung < \
len(richtungen) else 0)
d.fill(0)
wr.set_textpos(d,0,32)
wr.printstring(str(int(w+0.5)))
wr.set_textpos(d,32,32)
wr.printstring(richtungen[richtung])
d.show()
Wir holen uns die Mittelwerte der normierten Achsenwerte und berechnen aus dem x- und y-Wert den Peilwinkel der Marschrichtung, den wir ans Terminal senden und an die Funktion nord() übergeben. Der Index richtung in die Liste richtungen wird als Ganzzahl aus dem gerundeten Quotienten w/delta berechnet und auf den gültigen Bereich eingegrenzt.
Das Display wird gelöscht, nach dem Bestimmen der Ausgabeposition erfolgt die Ausgabe des Winkels und der Richtungsbezeichnung. Die Methode show() sendet den bestückten Framebuffer vom ESP8266 an das Display zur Anzeige.
Einsatz
Für den Einsatz im Freien ist es nötig, dass der ESP8266 das Programm autonom starten kann. Dafür speichert man den gesamten Programmtext unter dem Namen boot.py im Workspace ab und lädt diese Datei in den Flash des ESP8266 hoch. Beim nächsten Neustart bootet der ESP8266 mit dem Kompassprogramm auch ohne USB-Verbindung zum PC.
Ich wünsche Ihnen viel Vergnügen beim Bauen und Programmieren und natürlich bei vielen spannenden Abenteuern mit Ihrem neuen Wegbegleiter in Mutter Grün.

Rechazar 18: Entwicklungsumgebung










10 comentarios
Jürgen
Hallo, Mateus,
ich habe deine Configuration
SCL=Pin(2)
SDA=Pin(14)
auf einem ESP32 Dev Kit C V4 mit Erfolg getestet, an der Pinbelegung liegt es also nicht. Der OSError: [Errno 19] ENODEV – Fehler tritt auf, wenn auf dem Bus das angesprochene Device nicht gefunden wird, der Bus aber ordnungsgemäß initialisiert wurde. Auf dem Bus liegt ja noch das OLED-Display. Versuch doch mal folges Progrämmchen:
from machine import SoftI2C, Pin
from time import sleep
from oled import OLED
i2c=SoftI2C(Pin(2),Pin(14))
print(i2c.scan())
Wenn jetzt 60 als Ausgabe erscheint, dann liegt das Problem eindeutig am Weg zum QMC5883L. Bitte Masse-Verbindung und Betriebsspannung 5V am Modul überprüfen. Das Kompassmodul hat einen eigenen Spannungsregler für 3,3V an Bord und kriegt vielleicht zu wenig Spannung ab, wenn Vcc an 3,3V gelegt wird. Evtl. sind SCL und SDA vertauscht?
Gemein ist ein Kabelbruch an einem der Verbinder der Jumperkabel. Die gerissenen Cu-Fasern im Inneren lösten bei mir mehrfach zeitintensive Fehlersuchen aus, weil der Defekt durch die noch intakte Isolierung nicht zu sehen war. Nachmessen hat dann schnell den Fehler aufgedeckt. Im schlimmsten Fall kann natürlich auch das Kompassmodul buggy sein, was aber eher selten vorkommt.
Mateus
Hallo, herzlichen Glückwunsch zum Projekt.
Ich habe versucht, nach esp32/cam zu kompilieren, und es wird der folgende Fehler angezeigt:
in Zeile 262
k=QMC5883L
Ich habe mich an meine Situation angepasst
elif chip == ‘esp32’:
SCL=Pin(2)
SDA=Pin(14)
/——————
MPY: Sanfter Neustart
Dies ist der Konstruktor der OLED-Klasse
Größe: 128 × 64
Traceback (letzter Anruf zuletzt):
Datei „“, Zeile 262, in
Datei „“, Zeile 73, in init
Datei „“, Zeile 87, in configQMC
Datei „“, Zeile 80, in writeToReg
OSError: [Errno 19] ENODEV
Jürgen
@ Ulrich Klaas
Ja das läuft problemlos. Die Versorgungsspannung am Ring ist ja auch 5V. Am Eingang DIN liegt von seiten des Rings aber keine Spannung an, somit ist auch der GPIO des ESP8266 nicht gefährdet. Natürlich könnte man einen Transistor als Treiber und Pegelwandler zwischen Controller und Ring einbauen, aber das ist nicht zwingend nötig.
Ulrich Klaas
Und das läuft zuverlässig ? Die WS2812B Leds wollen doch 5V auf dem DIN haben. Klappt das mit den 3.3V vom ESP ?
Jürgen
Ein “s” zuviel im Pfadnamen hat das Chaos verursacht. Ich bitte vielmals um Entschuldigung. Der Tippfehler ist beseitigt und die Programm-Links habe ich alle getestet, jetzt funktioniert’s.
Andreas Wolter
Ich habe den Autoren kontaktiert. Wir werden das schnellstmöglich beheben. Danke für die Hinweise. Das ist uns leider durch die Lappen gerutscht.
Grüße,
Andreas Wolter
AZ-Delivery Blog
Herbert Dietl
Leider lassen sich die Programm Dateien/Codes auch nicht herunterladen.
Volker Froede
Leider funktionieren die Links nicht!
Andreas Kirchgaessner
Hi, leider lässt sich das PDF nicht herunterladen, da fehlerhaft.
AK
ToM
Sehr interessant! Immer wieder lese ich gerne deine Blog-Einträge bzw. sammle ich eifrig deine PDF’s. Allerdings: Dieser obige Link zu deiner Site (PDF) funktioniert nicht bzw. ist leer.
Beste Grüße
ToM