Diesen Beitrag gibt es auch als PDF-Dokument zum Download.
Im Teil 1 der Reihe AVR goes ESP hatte ich schon angedeutet, dass man im Prinzip einen AVR auch über den SPI-Bus direkt an einen ESP8266 oder ESP32 ankoppeln könnte. Diesen Ansatz werde ich heute in leicht abgewandelter Form wieder aufgreifen. Folge 1 und Folge 2 behandeln die Funkverbindung via NRF24L01-Modulen. Im heutigen Post werde ich den AVR als I2C-Slave an einen ESP8266 als Master anschließen und auf diese Weise zwei Fliegen mit einer Klatsche erlegen. Zum einen wird der AVR dadurch WLAN-fähig und zum anderen erhält der ESP8266-01 eine intelligente Porterweiterung. Neugierig geworden? Na dann, willkommen zu einer weiteren Episode zum Thema
MicroPython auf dem ESP32 und ESP8266
Untertitel:
AVR goes ESP8266/32 via I2C (Teil 3)

Rechazar 1: AVR-Slave am ESP8266-01-Master
Der Vorteil des I2C-Busses gegenüber dem SPI-Bus ist der, dass I2C nur zwei Leitungen, statt wenigstens drei braucht. Das spielt in diesem Fall eine wesentliche Rolle, weil ich mir den kleinsten Vertreter der ESP-Familie ausgesucht habe, einen ESP8266-01. Der hat nämlich nur 2 quasi-freie GPIOs. Betrachten wir das also als Herausforderung. Hier in Teil 3 schaffen wir die Grundlagen. Wir entwickeln ein Programm für den Nano V3, das diesen zu einem aktiven Allroundsensor macht. Für den AVR nutzen wir die Arduino-IDE. Für den ESP8266-01 schreiben wir eine Anwendung in MicroPython, welche es erlaubt, die Register des AVR über den I2C-Bus zu steuern und abzufragen. Aus der Sicht des ESP stellt der AVR quasi eine intelligente Porterweiterung dar. Natürlich lassen sich außer den IO-Leitungen auch alle anderen Features des AVR vom ESP8266-01 aus nutzen.
Hardware
|
1 |
|
|
1 |
|
|
1 |
|
|
2 |
|
|
1 |
|
|
1 |
|
|
1 |
|
|
2 |
|
|
1 |
|
|
1 |
|
|
diverse |
|
|
2 |
passende USB-Kabel |
|
1 |
Batterie 4,5V oder 5V-Steckernetzteil |
(*) alternative Möglichkeit weiter unten im Text
Aus dem Schaltplan der Entwicklungsumgebung des Projekts erkennen wir das Zusammenspiel der Teile.

Rechazar 2: Entwicklungssystem
Ein kleines Problem stellen die beiden unterschiedlichen Betriebsspannungen von AVR und ESP8266 dar. Das macht, zumindest während der Entwicklungsphase, einen Levelshifter notwendig, welcher die Spannungspegel auf den I2C-Leitungen anpasst. Die Versorgungsspannung für den ESP8266-01 liefert der FTDI-USB-TTL-Adapter. Aber Vorsicht! Der Jumper am Ausgang gegenüber der USB-Buchse muss auf 3,3V gesetzt sein, sonst stirbt der Controller.
Letzterer stirbt auch, wenn die GPIO-Leitungen mehr als 3,6V Spannung führen. Was tun also, wenn der angegebene Typ des Levelshifters nicht verfügbar ist? Die Lösung ist einfach. Auch in den Tagen hoch integrierter Chips ist ein diskreter Aufbau manchmal auch nicht verkehrt. Den Zusammenhang zeigt das folgende Schaltbild. Die beiden N-Kanal-MOSFETS 2N7000 sorgen dafür, dass ein 5V-Puls in einen 3,3V-Puls umgewandelt wird und umgekehrt. Andere MOSFETs sind dann auch brauchbar, wenn deren Gate-Threshold-Spannung wie beim 2N7000 (2,1V) kleiner ist, als die 3,3V der Versorgungsspannung. Wichtig: der Source-Anschluss des Transistors muss auf der Seite mit der niedrigeren Versorgungsspannung liegen.

Rechazar 3: Levelshifter mit CMOS-Transistor
Als Sockel für den ESP8266-01 verwenden wir einen breadboard-tauglichen Adapter, auf den das ESP-Modul in der angegebenen Richtung gesteckt wird. Zum Flashen der MicroPython-Firmware benötigen wir zwei Taster. Auf deren Gebrauch gehe ich später noch ein.
Der AVR wird, wie der FTDI-Adapter, aus einem USB-Anschluss versorgt. Auf dem Nano-V3-Board befinden sich bereits ein USB-TTL-Adapter mit dem Chip CH340 und ein 3,3V-Regler. Damit wir die Steuerung der Ports überprüfen können, schließen wir eine RGB-LED über drei Widerstände an bestimmte IO-Leitungen an. Der AVR hat drei Gruppen von IO-Anschlüssen, PortB, PortC und PortD. Die Bezeichnungen auf dem Board weichen davon ab. Weshalb, das wissen nur die Nano-V3-Entwickler. Ich komme von der Assemblerseite und bin daher bei den AVR-Bezeichnungen B, C und D daheim. Für uns sind daher jetzt erst einmal die richtigen Zuordnungen wichtig, denn die brauchen wir nachher bei der Programmierung.
|
AVR Port |
PD0 RXD |
PD1 TXD |
PD2 |
PD3 |
PD4 |
PD5 |
PD6 |
PD7 |
|
Nano V3 |
D0 RXD |
D1 TXD |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
|
AVR Port |
PB0 |
PB1 |
PB2 |
PB3 |
PB4 |
PB5 |
|
Nano V3 |
D8 |
D9 |
D10 |
D11 |
D12 |
D13 |
|
AVR Port |
PC0 |
PC1 |
PC2 |
PC3 |
PC4 |
PC5 |
|
|
|
Nano V3 |
A0 |
A1 |
A2 |
A3 |
A4 |
A5 |
A6* |
A7* |
* Nur TQFP-Variante und nur auch dort nur analoge Eingänge
Jede Portgruppe besitzt drei Register, ein Ausgangsregister genannt PORT, ein Eingangsregister PIN und ein Datenrichtungsregister (DDR). Unser Ziel ist es, alle drei Arten in ganzer Breite zu setzen und abzufragen. Ebenfalls sollen einzelne Bitoperationen möglich sein. Kommandos und Daten wandern dabei über den I2C-Bus. Die Gruppe C tanzt etwas aus der Reihe. Die C-Leitungen dienen neben ihrer Funktion als digitale Ports auch als analoge Eingänge des Multiplexers, der seinerseits den ADC (Analog-Digital-Converter) versorgt.
Die Software
Fürs Flashen und die Programmierung des ESP32:
Thonny oder
Für den Nano V3
arduino_als_slave.ino zur Kommunikation mit dem ESP8266-01 und zum Abarbeiten von Kommandos
Verwendete Firmware für den ESP8266/ESP32:
Bitte eine Stable-Version aussuchen
Das MicroPython-Programm zum Projekt:
esp_i2c_master.py: Zur Kommunikation mit dem Nano V3
MicroPython - Sprache - Module und Programme
Zur Installation von Thonny finden Sie hier eine ausführliche Anleitung. Darin gibt es auch eine Beschreibung, wie die MicropythonFirmware (Stand 03.02.2022) auf den ESP-Chip gebrannt wird.
MicroPython ist eine Interpretersprache. Der Hauptunterschied zur Arduino-IDE, wo Sie stets und ausschließlich ganze Programme flashen, ist der, dass Sie die MicroPython-Firmware nur einmal zu Beginn auf den ESP32 flashen müssen, damit der Controller MicroPython-Anweisungen versteht. Sie können dazu Thonny, µPyCraft oder esptool.py benutzen. Für Thonny habe ich den Vorgang hier beschrieben.
An dieser Stelle ein paar Takte zum Flashen des ESP8266-01. Der hat nämlich, anders als seine größeren Geschwister, keine Flash-Automatik an Bord. Hier ist Handarbeit gefragt.
Der Flashvorgang gliedert sich in zwei Teile, erstens Flash-Speicher löschen und zweitens Firmware übertragen. Für jeden Part muss beim ESP8266-01 folgendes passieren:
- a) In Thonny die Vorbereitungen erledigen, wie hier beschrieben
- b) Reset- und Flash-Taste drücken
- c) In Thonny den Flashvorgang starten
- d) Reset-Taste lösen, Flash-Taste halten, bis der Fortschritt angezeigt wird
- e) Flash-Taste lösen
- f) Warten bis erneut der Zugriff auf die COM-Schnittstelle gemeldet wird
- g) Dann erneut die Punkte b) bis f) durchlaufen und
- h) abschließend das Installer-Fenster schließen und die Options mit OK beenden
Sobald die Firmware geflasht ist, können Sie sich zwanglos mit Ihrem Controller im Zwiegespräch unterhalten, einzelne Befehle testen und sofort die Antwort sehen, ohne vorher ein ganzes Programm kompilieren und übertragen zu müssen. Genau das stört mich nämlich an der Arduino-IDE. Man spart einfach enorm Zeit, wenn man einfache Tests der Syntax und der Hardware bis hin zum Ausprobieren und Verfeinern von Funktionen und ganzen Programmteilen über die Kommandozeile vorab prüfen kann, bevor man ein Programm daraus strickt. Zu diesem Zweck erstelle ich auch gerne immer wieder kleine Testprogramme. Als eine Art Makro fassen sie wiederkehrende Befehle zusammen. Aus solchen Programmfragmenten entwickeln sich dann mitunter ganze Anwendungen.
Autostart
Soll das Programm autonom mit dem Einschalten des Controllers starten, kopieren Sie den Programmtext in eine neu angelegte Blankodatei. Speichern Sie diese Datei unter boot.py im Workspace ab und laden Sie sie zum ESP-Chip hoch. Beim nächsten Reset oder Einschalten startet das Programm automatisch.
Programme testen
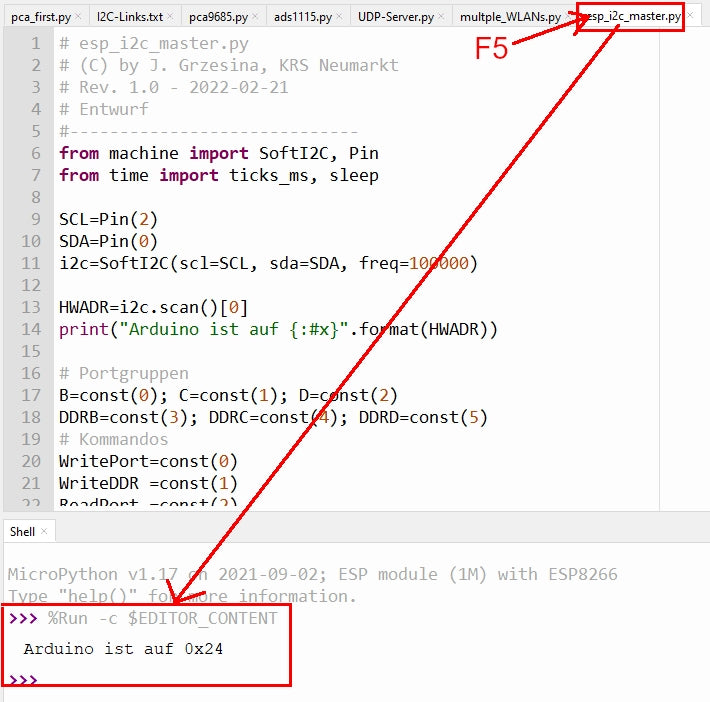
Manuell werden Programme aus dem aktuellen Editorfenster in der Thonny-IDE über die Taste F5 gestartet. Das geht schneller als der Mausklick auf den Startbutton, oder über das Menü Run. Lediglich die im Programm verwendeten Module müssen sich im Flash des ESP32 befinden.
Zwischendurch doch mal wieder Arduino-IDE?
Sollten Sie den Controller später wieder zusammen mit der Arduino-IDE verwenden wollen, flashen Sie das Programm einfach in gewohnter Weise. Allerdings hat der ESP32/ESP8266 dann vergessen, dass er jemals MicroPython gesprochen hat. Umgekehrt kann jeder Espressif-Chip, der ein kompiliertes Programm aus der Arduino-IDE oder die AT-Firmware oder LUA oder … enthält, problemlos mit der MicroPython-Firmware versehen werden. Der Vorgang ist immer so, wie hier beschrieben.
Für den AVR brauchen wir natürlich die Arduino-IDE. Hier kommt eine Kurzanleitung für die Installation derselben.
Einrichten der Arduino-IDE
Falls Sie noch nicht mit der Arduino-IDE gearbeitet haben und sich dieses Werkzeug noch nicht auf Ihrem Rechner befindet, folgen Sie bitte dieser Kurzanleitung.
Beginnen Sie mit dem Download der Installationsdatei über diesen Link.

Rechazar 4: Arduino-IDE herunterladen
Klicken Sie die Version, die Ihrem Betriebssystem entspricht und speichern Sie die Datei in einem Verzeichnis Ihrer Wahl.

Rechazar 5: Installationsdatei speichern
Starten Sie die Installationsdatei und folgen Sie der Benutzerführung. Wir brauchen für dieses Projekt keine externen Libraries für den AVR und sind hiermit sofort startklar.
In beiden Softwareteilen sind die einzelnen Aufgaben in Funktionen ausgelagert. Die Hauptschleife bleibt dadurch übersichtlicher und das gesamte Programm ist leichter zu pflegen. Beginnen wir mit dem MicroPython-Programm für den ESP8266-01.
Der ESP8266-01 als Master
Als Erstes sollten wir nach dem Flashen der Firmware dem ESP8266 abgewöhnen, nach einem Accesspoint zu suchen, weil das nach meinen Erfahrungen verschiedentlich zu merkwürdig eigensinnigem Verhalten des Moduls führt.
Auf der Kommandozeile von Thonny geben wir folgenden Befehl und dann "d" für „disable“ ein. Diese Aktion sollte jedes Mal nach dem Flashen der Firmware erfolgen.
>>> import webrepl_setup
WebREPL daemon auto-start status: disabled
Would you like to (E)nable or (D)isable it running on boot?
(Empty line to quit)
> d
No further action required
Nun zum Programm selbst. Wir gehen alles Schritt für Schritt durch.
from machine import SoftI2C, Pin
from time import ticks_ms, sleep
SCL=Pin(2)
SDA=Pin(0)
i2c=SoftI2C(scl=SCL, sda=SDA, freq=100000)
HWADR=i2c.scan()[0]
print("Arduino ist auf {:#x}".format(HWADR))
Der wichtigste Import ist der Treiber für die I2C-Schnittstelle. Es ist kein externes Modul nötig. Wir müssen also nichts zusätzlich aus dem Internet holen. Bei den Anschlüssen haben wir keine große Auswahl. Wir deklarieren die Pins und erzeugen ein I2C-Objekt. Solange kein weiteres I2C-Gerät außer unserem Nano V3 am Bus liegt, liefert uns der Scan-Befehl eindeutig seine Hardware-Adresse, die wir uns in hexadezimaler Schreibweise ausgeben lassen. Das ist ein erster Test, ob der Mikrocontroller auch ansprechbar ist - sobald der mit unserem Sketch gestartet wurde.
# Portgruppen
B=const(0); C=const(1); D=const(2)
DDRB=const(3); DDRC=const(4); DDRD=const(5)
# Kommandos
WritePort=const(0)
WriteDDR =const(1)
ReadPort =const(2)
ReadDDR =const(3)
INPUT=const(0)
OUTPUT=const(1)
Wir definieren diverse Konstanten für die Portgruppen, die Kommandos und die Datenrichtung.
Der ESP8266-01 kann Kommandos für das Beschreiben oder Lesen von Registern an den Nano V3 senden. Diese Befehle müssen natürlich die Adresse und die zu schreibenden Daten enthalten. Die beiden grundlegenden Funktionen für diesen Zweck sind writeReg() und readReg().
def writeReg(command,port,value):
buf=Portearray(3)
buf[0]=command
buf[1]=port
buf[2]=value
written=i2c.writeto(HWADR,buf)
return written
Das I2C-Interface verarbeitet ausschließlich Strukturen, die auf dem Portes-Protokoll aufbauen. Wenn wir zum Beispiel versuchen, eine Zahl zu senden, bekommen wir folgende Fehlermeldung.
>>> i2c.writeto(HWADR,2)
Traceback (most recent call last):
File "<stdin>", line 1, in <Módulo>
TypeError: object with buffer protocol required
Wir erzeugen daher ein Porte-Array Wir erzeugen daher ein Porte bekommen wir Devolver.
def readReg(command,port,direction=INPUT):
buf=Portearray(3)
buf[0]=command
buf[1]=port
buf[2]=direction
written=i2c.writeto(HWADR,buf)
sleep(0.1)
return i2c.readfrom(HWADR,1)
Ähnlich funktioniert das Einlesen von Registern. Zuerst senden wir mit dem Array das Kommando, die Adresse und die Datenrichtung. Mit INPUT wird das PIN-Register gelesen, das die logischen Pegel der als Eingang geschalteten Leitungen enthält. INPUT ist Standard, der Parameter direction kann beim Aufruf also auch weggelassen werden. Der Wert OUTPUT liest dagegen den Wert des Ausgangsregisters PORT ein.
Nach dem Fußvolk kommt jetzt die Kavallerie. Ab hier unterscheiden wir zwischen PORT, PIN und DDR. Um einen Port zu beschreiben müssen wir dem Nano V3 den Namen des Ports angeben und natürlich den Wert, der geschrieben werden soll.
def writePort(port,value):
assert port in range(3)
assert value in range(256)
written=0
try:
written=writeReg(WritePort,port,value)
except:
pass
return written
Wir versichern uns, dass als port nur die Nummern 0,1 oder 2 übergeben wurden und dass value im Bereich 0..255 inkl. liegt. Stimmt eines von beiden nicht, wird eine Assertation-Exeption geworfen und das Programm abgebrochen. Während der Entwicklung ist das hilfreich, um Fehler aufzudecken. In einem späteren Dienstprogramm sollte es dazu nicht mehr kommen.
>>> writePort(5,34)
Traceback (most recent call last):
File "<stdin>", line 1, in <Módulo>
File "<stdin>", line 57, in writePort
AssertionError:
Auch beim Schreiben auf den Bus kann es zu Fehlern kommen, etwa wenn unser Nano V3 gerade unpässlich ist und keine Daten empfangen kann. So etwas kann aber erst zur Laufzeit des Programms geprüft werden und darf dann nicht zum Abbruch führen. Deshalb setzen wir written schon einmal auf 0 und fangen etwaige Fehler durch die try-except-Struktur ab. An dem zurückgegebenen Wert der Funktion können wir dann sehen, ob Zeichen gesendet wurden. Eine analoge Funktion legen wir auch für die Datenrichtungsregister an.
def writeDDR(port,value):
assert port in range(3)
assert value in range(256)
try:
written=writeReg(WriteDDR,port,value)
except:
pass
return written
Auch die Funktionen für das Lesen von Registern ähneln sich stark.
def readPort(port):
assert port in range(3)
try:
inhalt=readReg(ReadPort,port,OUTPUT)
except:
pass
return inhalt
def readInput(port):
assert port in range(3)
try:
inhalt=readReg(ReadPort,port,INPUT)
except:
pass
return inhalt
def readDDR(port):
inhalt=None
assert port in range(3)
try:
inhalt=readReg(ReadDDR,port)
except:
pass
return inhalt
Als Rückgabewert erhalten wir die Inhalte des jeweiligen Registers.
Etwas aufwendiger gestaltet sich das Setzen einzelner Bits. Die Funktion soll die PORTs ebenso wie die DDRs bedienen und Bits setzen (1) aber auch löschen (0) können.
def setBit(port,pos,val):
assert val in range(2)
if port in range(3):
cont=readPort(port)[0]
else:
assert 3<=port<=5
cont=readDDR(port-3)[0]
if val==1:
cont |= 1<<pos
else:
cont &= 0<<pos
if port in range(3):
writePort(port,cont)
else:
writeDDR(port-3,cont)
Wir holen uns also das entsprechende Register, gemäß der Adresse.
B=const(0)
C=const(1)
D=const(2)
DDRB=const(3)
DDRC=const(4)
DDRD=const(5)
Dann setzen (durch Oderieren) oder löschen (durch Undieren) wir das Bit an der Position pos. Denken Sie daran, dass x & 0 stets 0 ergibt und x | 1 stets 1. Nach der Operation schreiben wir das Register dorthin zurück, wo es hergekommen ist. Ich habe die virtuellen Adressen der DDRs um 3 höhergelegt, als die Portadressen. Daher kommt die Subtraktion der 3 beim Zugriff auf die Richtungsregister.
Das Auslesen eines Bit-Werts ist unspektakulär und trotzdem trickreich. Wir holen das entsprechende Register, isolieren das Bit und schieben es in die Position von Bit 0. Der Rückgabewert ist deshalb stets 0 oder 1.
Das komplette Programm für den ESP8266-01 liegt hier zum Download bereit.
Der AVR-Slave
Dieses Projekt hat im Hinblick auf den Nano V3 Mikrocontroller einen Doppelnutzen. Zum einen wird gezeigt, wie man einen AVR als I2C-Slave einsetzen kann. Zum anderen wird dadurch aber auch deutlich, wie ein handelsüblicher I2C-Baustein wie der SHT21 (Temperatur und rel. Luftfeuchte) oder der BMP280 (Luftdruck und Temperatur) intern arbeiten.
Damit der Nano V3 zum I2C-Slave wird, muss man nicht viel tun. Wir binden lediglich die Library Wire.h ein und erzeugen unter Angabe einer Hardware-Adresse (0x24) eine Wire-Instanz. Die Anschlüsse für SCL und SDA liegen beim ATmega328 Mikrocontroller fest auf den Pins A5 (PC5) und A4 (PC4). Alle anderen Port-Pins können wir als IO-Leitungen oder in einer ihrer Sonderfunktionen nutzen. Für ersteres ist der folgende Sketch zuständig.
void setup() {
Wire.begin(0x24);
Serial.begin(115200);
Wire.onReceive(auftrag);
Wire.onRequest(senden);
Serial.println("AVR-Slave on HWADR 0x24");
}
bool nachricht=false;
uint8_t received[]={0,0,0,0,0,0,0,0};
uint8_t nob=0;
uint8_t inhalt;
uint8_t command;
Nach der Initialisierung der seriellen Schnittstelle deklarieren wir zwei Eventhandler. Das sind Prozeduren, die asynchron zum laufenden Hauptprogramm aufgerufen werden, wenn ein bestimmtes Ereignis eintritt. Das Hauptprogramm wird dadurch kurz unterbrochen. Der laufende Befehl wird noch beendet (1), dann springt der Programmzeiger an den Start des Event-Handlers (2), das Ereignis wird bedient (3) und danach erfolgt der Rücksprung ins unterbrochene Programm (4), das mit der Ausführung der nächstfolgenden Anweisung fortfährt (5).

Rechazar 6: Das geschieht bei einem IRQ
Die Unterbrechungsanforderungen (aka Interrupt Request oder kurz IRQ) kommen in unserem Fall von der I2C-Schnittstelle des ATMega328. Der erste IRQ wird ausgelöst, wenn Zeichen Über den I2C-Bus ankommen. Wir werden in Kürze eine Prozedur auftrag() deklarieren, die dieses Ereignis bedient. Das zweite Ereignis tritt ein, wenn wir den AVR auffordern, uns Daten zu senden. Der Event triggert die Prozedur senden(). Diese Art der Programmierung durch Event-Handler entbindet uns von der Aufgabe, permanent das I2C-Interface selbst überwachen zu müssen (Polling).
Wir lassen uns die Hardware-Adresse im seriellen Monitor ausgeben, schließen die Setup-Prozedur ab und deklarieren noch eine Reihe von globalen Variablen. Dann betreten wir die Main-Loop.
void loop() {
if (nachricht) {
command=received[0];
if (command==0){
writePrt(received[1],received[2]);
}
if (command==1){
writeDDR(received[1],received[2]);
}
if (command==2){
readPrt(received[1],received[2]);
}
if (command==3){
readDDR(received[1]);
}
nachricht=false;
}
}
Die Variable nachricht wird true, wenn ein Schreibbefehl vom ESP8266-01 eingetroffen ist. Das erste Porte (in received[0]) enthält das Kommando, mit dem wir dem Nano V3 sagen, was zu tun ist. Bei den Werten 0 und 1 handelt es sich um Schreibbefehle. Wir übergeben die Port-Nummer, die über das zweite Porte kommt 0]) enthält das Kommando, mit dem wir dem Nano V3 sagen, was zu tun ist. Bei den Werten 0 und 1 handelt es sich um Schreibbefehle. Wir übergeben die Port-Nummer, die über das zweite Porte Nummer drei an die entsprechenden Prozeduren.
Mit der Kommandonummer 2 fordert der ESP8266-01 ein Porte von Mit der Kommandonummer 2 fordert der ESP8266-01 ein Porte in received[1] spezifiziert ist. Der Parameter in received[2] sagt uns, ob das PORT-Register (Ausgabe-Puffer) oder das PIN-Register (Eingabe-Puffer) gelesen werden soll. Die Routine readPrt() bedient diesen Auftrag.
Zum Auslesen des DDR muss nur die Portgruppe bekannt sein, sie kommt wie üblich im zweiten Porte.
Nach dem Abarbeiten des Auftrags wird nachrichten auf false gesetzt und loop() lauert auf die nächste Anfrage. Durch das Auslagern der ganzen Befehle in einzelne Prozeduren, die zum Ausführen der Anfragen nötig sind, bleibt die Main-Loop klar und übersichtlich.
Kommen wir zu den Event-Handlern. Diese Prozeduren sollen als Interrupt Service Routinen (aka ISR) möglichst kurz sein. Außerdem geben sie keine Werte zurück, an wen denn auch?! Schließlich werden sie nicht von einer stets gleichen Stelle des übergeordneten Prozesses aus aufgerufen, sondern sporadisch an zufälligen und wechselnden Positionen in der Hauptschleife gestartet.
void auftrag(int anzahl) {
nob=0;
while(Wire.available()){
received[nob]=Wire.read();
nob += 1;
}
nachricht=true;
}
In anzahl soll die Anzahl eingetroffener Zeichen an auftrag()übergeben werden. Wir zählen Rechazar selber mit, nob (Number of Portes) ist der Zähler, den wir zu Beginn auf 0 setzen und in der Schleife als Index im Array received[] benutzen. Weil wir keinen Wert zurückgeben können, benutzen wir die globale Variable nachricht als Flag für angekommene Zeichen. Alles andere erledigt die Hauptschleife mit ihren Vasallen.
void senden(void){
Wire.write(inhalt);
}
Die kürzeste Prozedur des Programms sendet nur den Inhalt der globalen Variablen inhalt über den Bus. Für den Inhalt der Variablen sind die Dienstroutinen zuständig, die auf Lesebefehle vom ESP8266-01 reagieren.
Zum Schreiben in eines der Portregister dient die Arbeits-Biene writePrt(). Sie erhält die Portbezeichnung und den Wert. Aufgrund der von uns vergebenen Portnummer erledigen die Schreibbefehle in der switch-Struktur schließlich den Rest.
void writePrt(uint8_t port, uint8_t val){
switch (port){
case 0:
PORTB=val;
break;
case 1:
PORTC=val;
break;
case 2:
PORTD=val;
break;
default:
break;
}
}
In ähnlicher Weise arbeitet die Prozedur writeDDR().
void writeDDR(uint8_t port, uint8_t val){
switch (port){
case 0:
DDRB=val;
break;
case 1:
DDRC=val;
break;
case 2:
DDRD=val;
break;
default:
break;
}
}
Dieses Projekt zeigt in beiden Teilen, ESP8266-01- und MicroPython-Part, verschiedene Ansätze der programmtechnischen Umsetzung auf. Vielleicht haben Sie sich gerade gedacht, die beiden Prozeduren gleichen sich doch wirklich wie ein Ei dem anderen. Die müsste man doch zusammenfassen können. Das geht in der Arduino-IDE aber nicht, denn DDRB + 1 ist eben nicht DDRC. In Assembler wäre aber genau das durch die Verwendung der AVR-internen Speicheradressen machbar, in der Arduino-IDE müsste man dafür einige Klimmzüge machen, drum lassen wir es lieber.
Wenn man neben unseren PORT-Nummern im MicroPython-Programm (B=0, C=1 und D=2) auch Nummern für die DDRs einführt, wäre eine Zusammenführung in einer Prozedur möglich. Dennoch müssten wir innerhalb der Routine wieder zwischen PORT und DDR differenzieren.
Eine Prozedur, die einen kleinen Schritt in Richtung Integration geht, ist readPrt(). Hier berücksichtigen wir, dass für eine Portgruppe sowohl das Ausgaberegister PORT als auch das Eingangsregister PIN ausgelesen werden muss. Möglich wird das in einer Prozedur durch die Einführung eines weiteren Parameters dir, mit dem wir die Richtung angeben, 0 für Eingang, 1 für Ausgang. Natürlich wird innerhalb der Routine wieder die Unterscheidung zwischen PIN und PORT erforderlich. Die Konzentration in weniger Routinen müsste man also mit mehr Parametern beim Prozeduraufruf und vor allem mit komplexerem Code im Prozedurkörper bezahlen. Um das Programm übersichtlicher und pflegeleichter zu gestalten, haben wir ja gerade die Arbeitstiere aus der Main-Loop in einzelne Routinen ausgelagert.
Von der Philosophie zurück zum wirklichen Leben, hier ist die Prozedur readPrt(). Ich denke, zum Code selber muss ich jetzt nichts mehr weiter ausführen, die Struktur kennen wir ja schon.
void readPrt(uint8_t port, uint8_t dir) {
if (dir==0){
switch (port){
case 0:
inhalt=PINB;
break;
case 1:
inhalt=PINC;
break;
case 2:
inhalt=PIND;
break;
default:
break;
}
}
else{
switch (port){
case 0:
inhalt=PORTB;
break;
case 1:
inhalt=PORTC;
break;
case 2:
inhalt=PORTD;
break;
default:
break;
}
}
}
Auch die Routine zum Auslesen der DDRs bietet nichts Neues.
void readDDR(uint8_t port) {
switch (port){
case 0:
inhalt=DDRB;
break;
case 1:
inhalt=DDRC;
break;
case 2:
inhalt=DDRD;
break;
default:
break;
}
}
Test der Verbindung
Den Sketch arduino_als_slave.ino gibt es zum Download, folgen Sie einfach dem Link. Zum Testen schließen wir beide, den Nano V3 und den ESP8266-01, mit je einem USB-Kabel am PC an.
Zuerst laden wir den Sketch auf den Nano V3 hoch. Dazu stellen wir das richtige Board und die richtige COM-Schnittstelle ein. Bei mir sind das der Nano und COM3.

Rechazar 7: Boardauswahl

Rechazar 8: Serielle Schnittstelle auswählen
Ein Klick auf den Pfeilbutton startet den Upload des Sketches. Das dauert einige Zeit.

Rechazar 9: Upload starten
Mit der folgenden Meldung sagt uns die Arduino-IDE, dass die Kompilation und der Upload erfolgreich verlaufen sind.

Rechazar 10: Upload erfolgreich Rechazar
Dann starten wir Thonny, laden die Datei esp_i2c_master.py in ein Editorfenster und starten es mit der Funktionstaste F5. Das Programm verrät uns die Hardware-Adresse des Nano V3, initialisiert die I2C-Instanz und registriert unsere Funktionen. Jede von ihnen können wir jetzt von Hand testen, und wenn es Not tut, natürlich auch sofort nachbessern und erneut testen. Erkennen Sie den Unterschied zum Arbeiten mit der Arduino-IDE?
In der nächsten Folge werden wir die Funktionssammlung in einem Modul in einer Klasse integrieren und damit ein Programm stricken. Aber jetzt zum Test.
Rechazar 11: MicroPython-Programm starten
Wir haben die RGB-LED an den Pins D2, D3 und D4 liegen. Die gehören zum Port PORTD und haben die gleichen Nummern. Im DDR müssen diese Pins als Ausgang geschaltet werden. Bit2, Bit3 und Bit4 (von rechts nach links, beginnend bei 0) werden auf 1 gesetzt.
>>> writeDDR(D,0b00011100)
3
Es wurden 3 Bits über den Bus geschickt. Ob die auch richtig angekommen sind und verarbeitet wurden, wird sich gleich nach dem nächsten Aufruf zeigen.
>>> writePort(D,0b00011100)
3
Und sieh da – die LED gibt weißes Licht ab, es müssen also alle drei Kanäle eingeschaltet sein. Gegenprobe – die rote LED liegt bei mir an PD3 – also mal eben kurz wutschen und wedeln … lumos!
>>> writePort(D,0b00001000)
3
Ich habe soeben den grünen (PD3) und den blauen (PD4) Kanal ausgeschaltet, rotes Licht bleibt übrig.
Lassen Sie uns zum Abschluss dieses Posts noch eine kleine Lichtorgel basteln.
Geben Sie die folgenden Zeilen einfach ganz am Ende der Datei esp_i2c_master.py ein, oder entfernen Sie aus dem Download die Kommentarzeichen. Nach dem Abspeichern (Strg + S) starten Sie wieder mit F5.
writeDDR (D,0b00011100) # PD2,PD3,PD4 auf Ausgang
writePort(D,0) # alle Ausgangs-Leitungen auf 0
while 1: # Dauerlauf
for i in range(8): # von 0 bis 7 laufen lassen
writePort(D,i<<2) # die Bits von i um 2 Pos. nach links
sleep(1) # kleine Pause
Viel Vergnügen beim weiteren Experimentieren! Die bisher erschienen Posts zum Thema MicroPython finden Sie übrigens hier.









